ROS_机器人urdf建模仿真实践
本文共 1578 字,大约阅读时间需要 5 分钟。
实践内容: 1、运用
urdf建模实现案例中的机器人。 2、根据以上掌握的方法,再快速创建一个机器人模型。
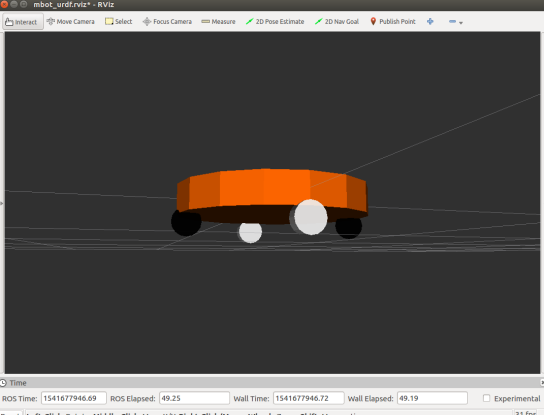
成果图:
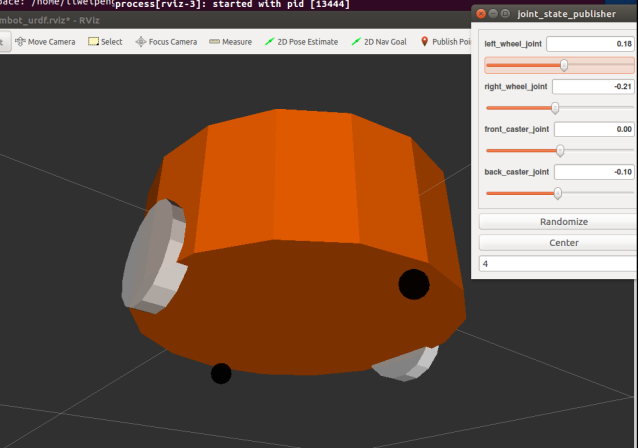
成果图
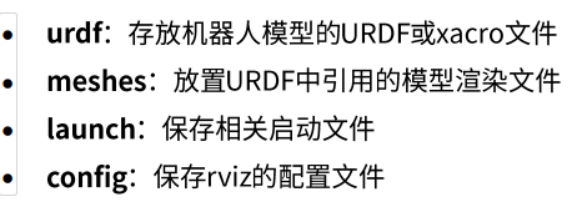
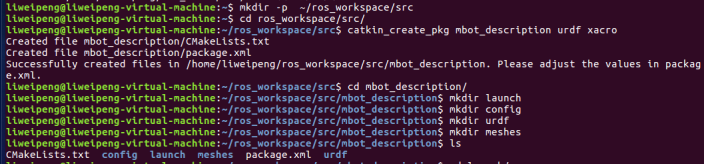
创建需要用到的功能包以及各种文件夹:
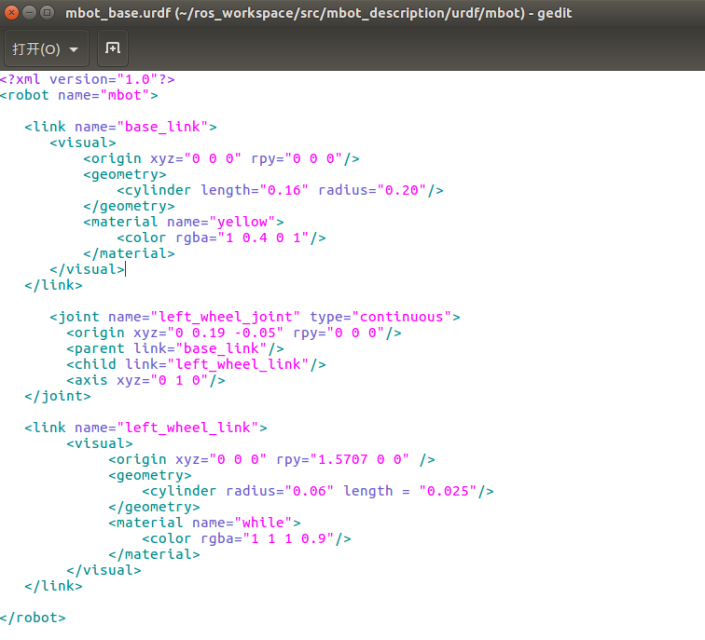
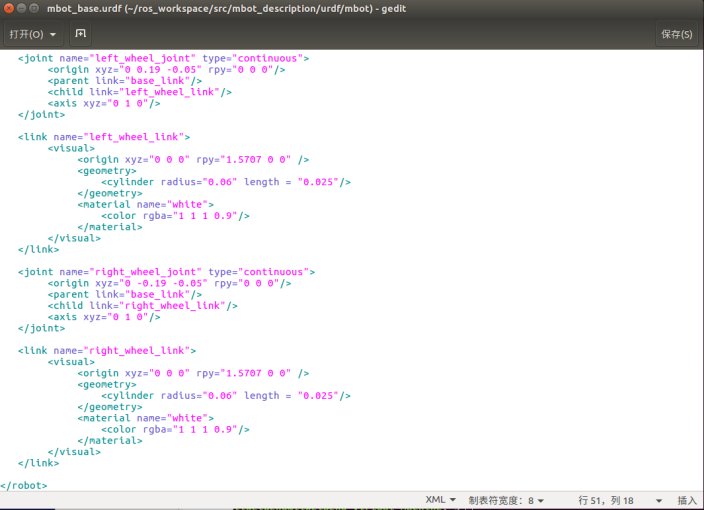
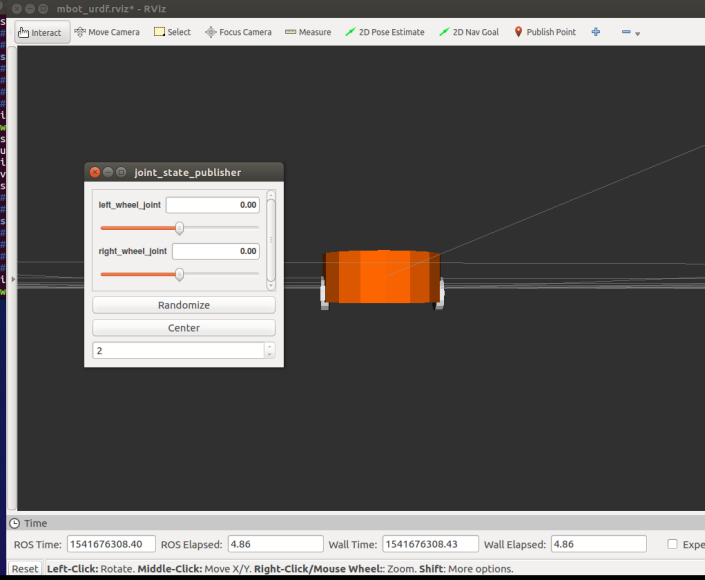
添加左轮:
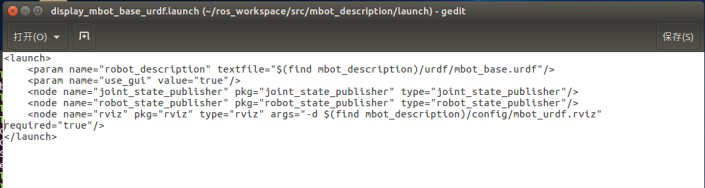
roslaunch mbot_description display_mbot_base_urdf.launch
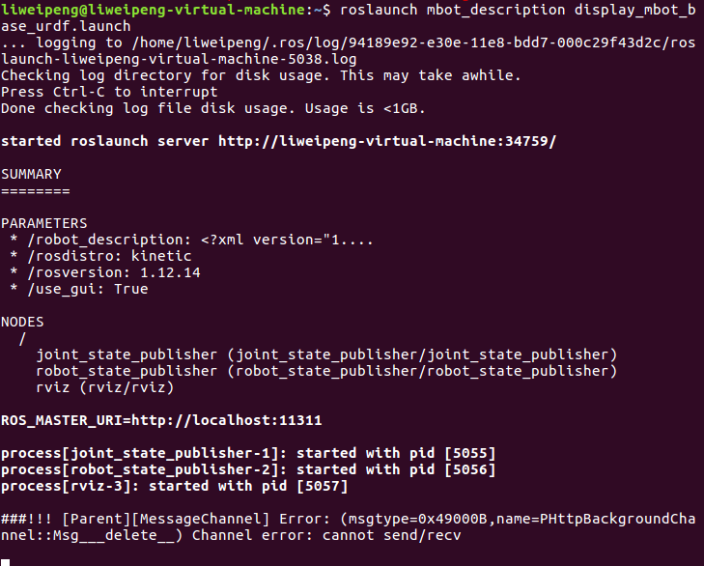
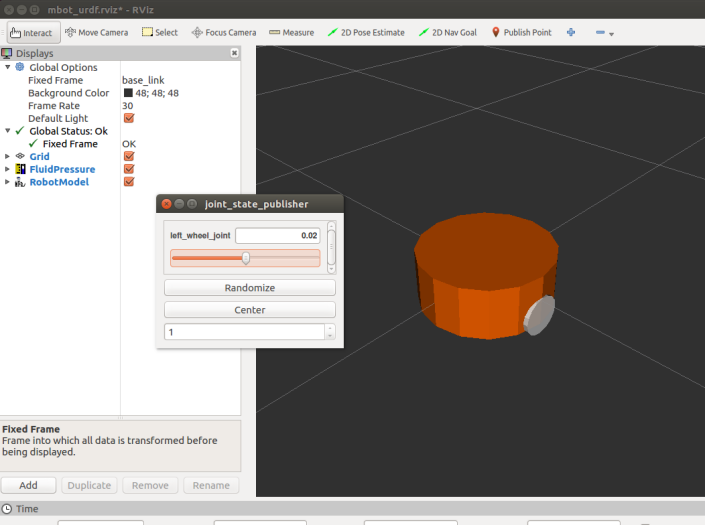
效果: (当然打开之后需要进行下面一番骚操作先——设置好RobotModel)
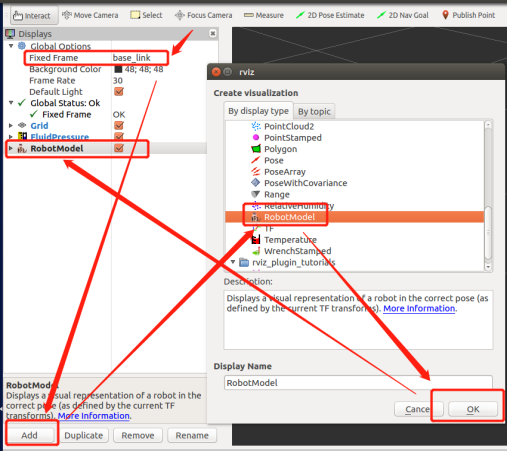
拖动滑动条控制轮子转动:
添加右轮:
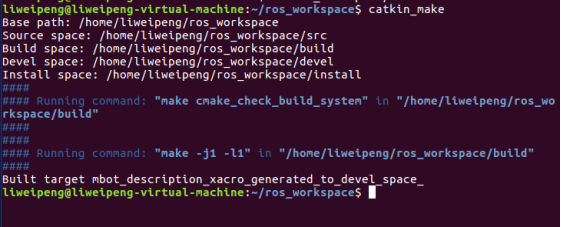
编译,启动,
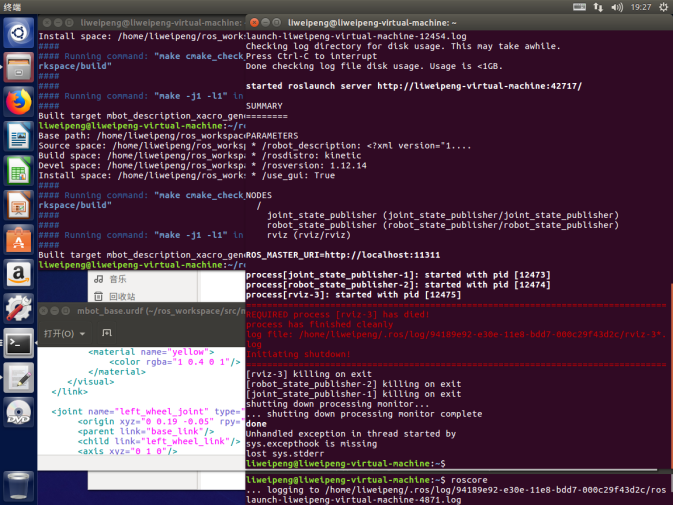
效果如下:
使用球体创建前后支撑轮:
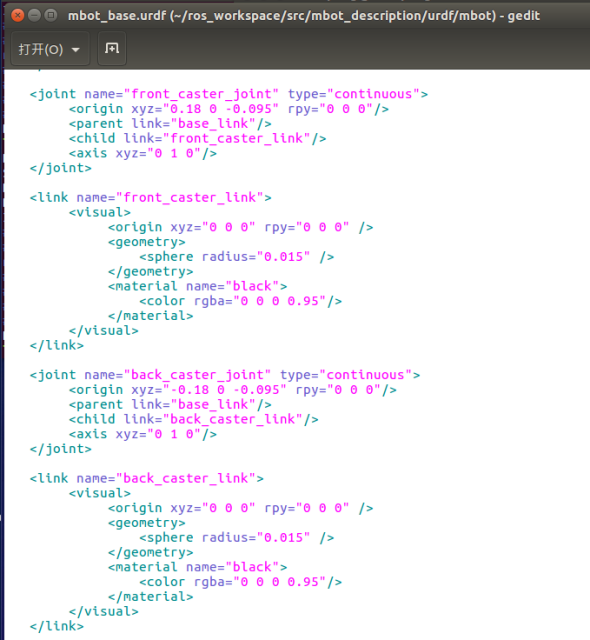
编译,启动,效果如下:
创建一个自己的机器人模型:
代码:效果:
转载地址:http://wsbnl.baihongyu.com/
你可能感兴趣的文章
Spring MVC如何把全局异常记录到日志中?
查看>>
2015.10.10信息系统项目管理师作业
查看>>
我的友情链接
查看>>
Java8-Stream-终止操作-归约与收集
查看>>
NOSQL分类
查看>>
VUE学习遇到的问题及解决方法(一)
查看>>
Python中lambda的用法
查看>>
E036-rpmdb open failed
查看>>
基于结构化平均感知机的分词器Java实现
查看>>
IPFS是什么?
查看>>
机器学习:从入门到晋级
查看>>
安卓constraintLayout中app:srcCompat设置的图片显示不出来
查看>>
nginx 安装在ubuntu上
查看>>
iOS地图选址
查看>>
Shpinx在PHPCMS里的使用及配置
查看>>
Linux Oracle Rac 10G 搭建& Patch
查看>>
Apache与Nginx网络模型对比
查看>>
Java 二重循环实现对象去重
查看>>
[Unity3d]socket通信 切换到web版本时报错SecurityException解决办法
查看>>
修改windows service的启动类型
查看>>